


Pilotage 4 axes pour moteur pas a pas + 4 servos moteurs cc+8 entrees+8 sorties(version usb)
Description
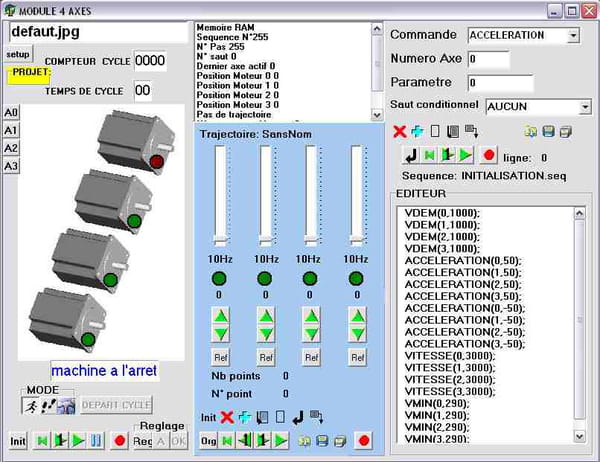
Ce programme permet de développer des applications basées sur des motorisations a moteurs pas à pas.
On peut piloter 4 moteurs simultanément en mode pas entier ou demi pas sur une plage de vitesse de 2,5Hz à 65500Hz En plus il est prévu le pilotage de 4 servomoteurs courant continu, de 8 entrées et de 8 sorties.
Et pour ceux qui auraient besoin d'un fonctionnement trés doux j'ai également intégré un mode micro pas (2 axes par carte)
J'ai rajouté une carte 4 axes micro pas basée sur le circuit ALLEGRO A3977 C'est une carte complète en format Europe piloté par USB (module FDTI en port virtuel)
Il est prévu d?étendre le nombre de moteurs à 64.
Il y a une trentaines de commandes (deplacement, vitesse, accélération...) en plus j'y ai ajouté un éditeur de trajectoire par apprentisage
il peut être utilisées soit en mode interprété soit en mode embarqué soit en ligne de commande. On peut également mixer les différebts modes dans des developpement spécifiques. Il est tres facile de rajouter des commandes suplémentaires dans l'interpreteur (réalisation de macro-commannde ou de fonctions spécifiques)
L?application comprend une fonction pour la conversion en fichier ?C? compilable.
Enfin le module peut être utilisé comme composant intégré à un programme.(voir application complémentaire)
Pour ceux qui voudraient tester ce code sans le compiler vous trouverez l'exécutable à l'adresse:
http://jlen.fr/telechargement_programme.html
pour interfacer les moteurs j'ai utilitié une carte ZILOG Z8F64200100 pour la logique pour la puissance vous trouverez les typons dans le zip ( pas très compliqués: tout en simple face!! et pas de composants exotiques).
ce programme utilise le composant TCOMPORT (lien dans le fichier "NOTES.HTM").
Pour le fonctionnement tout ce qui concerne les déplacements est traité en logique déportée par la carte zilog : c'est le programme en 'C' (la carte est fournie avec son compliateur et son programmateur). L'interface homme/machine et la programmation des déplacements est faite par le PC.
Pour des explications plus détaillées allez voir le fichier "NOTES.HTM" dans le zip.
Compte tenu de la complexité et des possibilités de ce programme je n'ai ceratinement pas testé toutes les combinaisons possibles et je compte sur vous pour me signaler les bugs
La modification concerne les vitesses maxis qui ont été portées de 16000Hz à 65535Hz et les accélérations maxi qui passent à 1000Hz/ms
La bufferisation des commandes process en cours permet de masquer les temps de transmission.
1/11/2005 ajouter fichiers des cartes au format TCI(voir "NOTES.HTM")
corections du bug d'arret d'urgence suite à modification de la gestion des axes
modifier gestion des temps de cycle en mode pas à pas (sequence seule)
le 16/03/2006
Ajouter la carte 4 axes micro pas et les fichiers 'C' pour le pilotage
On peut piloter 4 moteurs simultanément en mode pas entier ou demi pas sur une plage de vitesse de 2,5Hz à 65500Hz En plus il est prévu le pilotage de 4 servomoteurs courant continu, de 8 entrées et de 8 sorties.
Et pour ceux qui auraient besoin d'un fonctionnement trés doux j'ai également intégré un mode micro pas (2 axes par carte)
J'ai rajouté une carte 4 axes micro pas basée sur le circuit ALLEGRO A3977 C'est une carte complète en format Europe piloté par USB (module FDTI en port virtuel)
Il est prévu d?étendre le nombre de moteurs à 64.
Il y a une trentaines de commandes (deplacement, vitesse, accélération...) en plus j'y ai ajouté un éditeur de trajectoire par apprentisage
il peut être utilisées soit en mode interprété soit en mode embarqué soit en ligne de commande. On peut également mixer les différebts modes dans des developpement spécifiques. Il est tres facile de rajouter des commandes suplémentaires dans l'interpreteur (réalisation de macro-commannde ou de fonctions spécifiques)
L?application comprend une fonction pour la conversion en fichier ?C? compilable.
Enfin le module peut être utilisé comme composant intégré à un programme.(voir application complémentaire)
Pour ceux qui voudraient tester ce code sans le compiler vous trouverez l'exécutable à l'adresse:
http://jlen.fr/telechargement_programme.html
Source / Exemple :
tout est dans le zip
Conclusion :
pour interfacer les moteurs j'ai utilitié une carte ZILOG Z8F64200100 pour la logique pour la puissance vous trouverez les typons dans le zip ( pas très compliqués: tout en simple face!! et pas de composants exotiques).
ce programme utilise le composant TCOMPORT (lien dans le fichier "NOTES.HTM").
Pour le fonctionnement tout ce qui concerne les déplacements est traité en logique déportée par la carte zilog : c'est le programme en 'C' (la carte est fournie avec son compliateur et son programmateur). L'interface homme/machine et la programmation des déplacements est faite par le PC.
Pour des explications plus détaillées allez voir le fichier "NOTES.HTM" dans le zip.
Compte tenu de la complexité et des possibilités de ce programme je n'ai ceratinement pas testé toutes les combinaisons possibles et je compte sur vous pour me signaler les bugs
La modification concerne les vitesses maxis qui ont été portées de 16000Hz à 65535Hz et les accélérations maxi qui passent à 1000Hz/ms
La bufferisation des commandes process en cours permet de masquer les temps de transmission.
1/11/2005 ajouter fichiers des cartes au format TCI(voir "NOTES.HTM")
corections du bug d'arret d'urgence suite à modification de la gestion des axes
modifier gestion des temps de cycle en mode pas à pas (sequence seule)
le 16/03/2006
Ajouter la carte 4 axes micro pas et les fichiers 'C' pour le pilotage
Codes Sources
- AppliMiniC.dpr
- AppliMiniC.res
- CARRE.c
- CARRE.Trj
- Carte de puissance Mico Pas.Tci
- Carte de puissance.Tci
- COMMANDE.c
- COMMANDE.h
- communication.c
- communication.h
- Cprog.cpg
- CS04MP2A.zdsproj
- CS0U4MP2A.Tci
- CUBE.Trj
- defaut.jpg
- defaut1.jpg
- EditeurTrajet.dfm
- EditeurTrajet.pas
- EDTRAJ.cfg
- EDTRAJ.dof
- EDTRAJ.dpr
- EDTRAJ.res
- flash_IO.c
- flash_IO.h
- gpio.c
- gpio.h
- HeaderProcess.Txt
- Image1.jpg
- Image10.gif
- Image11.gif
- Image12.gif
- Image13.gif
- Image14.gif
- Image15.gif
- Image16.gif
- Image17.jpg
- Image18.gif
- Image19.jpg
- Image2.gif
- Image20.gif
- Image21.gif
- Image22.gif
- Image23.gif
- Image24.jpg
- Image25.jpg
- Image26.jpg
- Image3.gif
- Image4.gif
- Image5.gif
- Image6.gif
- Image7.gif
- Image8.gif
- Image9.gif
- INIT.seq
- INITIALISATION.seq
- interpreteur.c
- interpreteur.h
- main.c
- main.h
- master.pro
- master.wsp
- ModuledeCommande.cfg
- ModuledeCommande.dof
- ModuledeCommande.dpr
- ModuledeCommande.res
- NOTES.htm
- PortSerie.dfm
- PortSerie.pas
- process.c
- process.h
- SEQ1.seq
- SEQ2.seq
- SEQ3.seq
- SEQ4.seq
- SEQ5.seq
- SIO.H
- TestModuledeCommande.res
- timer microstep.c
- timer.h
- TIMERMP.c
- TIMERMP.h
- uart.c
- uart.h
- Unit1.dfm
- Unit1.pas
- Unit2.dfm
- Unit2.pas
- utilitaires.c
- utilitaires.h
- UTILITAIRESMP.c
- variables.c
- variables.h
- VARIABLESMP.c
- zsldevinit.asm
A voir également
- Pilotage 4 axes pour moteur pas a pas + 4 servos moteurs cc+8 entrees+8 sorties(version usb)
- Utf-8 c++ ✓ - Forum C++ & C++ .NET
- Date des 4 saisons - Forum PHP
- "Php version 4.4.5" "build date" "server api" "php variables" ✓ - Forum PHP
- Php version 4.4.6 build date server api php variables - Forum PHP
- "Php version 4.4.6" "build date" "server api" "php variables" - Forum PHP
Vous n'êtes pas encore membre ?
inscrivez-vous, c'est gratuit et ça prend moins d'une minute !
Les membres obtiennent plus de réponses que les utilisateurs anonymes.
Le fait d'être membre vous permet d'avoir un suivi détaillé de vos demandes et codes sources.
Le fait d'être membre vous permet d'avoir des options supplémentaires.