


Pilotage robot delta
Description
Vous trouverez sur Internet beaucoup de documents sur ces robots très particuliers.
http://fr.wikipedia.org/wiki/Robot_Delta
Ils ont plein d'avantages, mais nécessitent un algorithme de pilotage très spécial.
Un de mes amis ayant décidé d'en construire un, il a besoin de valider cet algorithme avant de l'implémenter en réel (au risque de tout casser si des commandes inappropriées sont envoyées aux servo-moteurs)
Je publie au cas où ça puisse servir à d'autres.
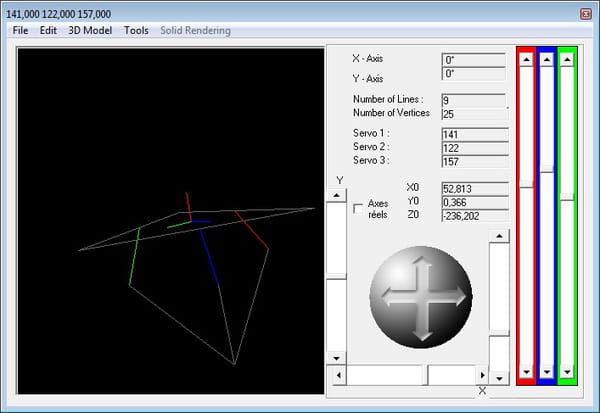
Outre la visu 3D (très sommaire et reprise d'un autre auteur) le principal est :
- l'algo qui permet de calculer la position de la nacelle(partie mobile) en fonction de l'angle de chacun des 3 servos.
- et surtout l'algo inverse qui calcule l'angle à donner à chaque servo pour que la nacelle atteigne une position définie en X,Y Z
C'est très intéressant de voir la cinématique complexe suivie par les 3 servos en même temps lors d'une simple translation sur le potentiomètre horizontal (axe des x).
Ça me semble évident, mais au cas où, je précise que les 3 potentiomètres sur la droite correspondent couleur par couleur aux 3 servos visualisés en 3D.
De même, les 3 potentiomètres autour de la boule correspondent à la position de la nacelle en X,Y et Z, le Z étant le potentiomètre de droite.
Pour simplifier les calculs, tous les auteurs (je n'ai pas inventé l'algo, juste implémenté en VB...) se ramènent à des droites parallèles aux axes réels du robot. Evidemment, un robot réel ne peut être construit sur ces axes (en particulier parce qu'ils se rejoignent au centre de la nacelle et que c'est mécaniquement impossible) Il y a une case à cocher pour visualiser ces axes réels, mais c'est encore incomplet.
http://fr.wikipedia.org/wiki/Robot_Delta
Ils ont plein d'avantages, mais nécessitent un algorithme de pilotage très spécial.
Un de mes amis ayant décidé d'en construire un, il a besoin de valider cet algorithme avant de l'implémenter en réel (au risque de tout casser si des commandes inappropriées sont envoyées aux servo-moteurs)
Je publie au cas où ça puisse servir à d'autres.
Outre la visu 3D (très sommaire et reprise d'un autre auteur) le principal est :
- l'algo qui permet de calculer la position de la nacelle(partie mobile) en fonction de l'angle de chacun des 3 servos.
- et surtout l'algo inverse qui calcule l'angle à donner à chaque servo pour que la nacelle atteigne une position définie en X,Y Z
Source / Exemple :
Voir zip en pièce jointe.
Conclusion :
C'est très intéressant de voir la cinématique complexe suivie par les 3 servos en même temps lors d'une simple translation sur le potentiomètre horizontal (axe des x).
Ça me semble évident, mais au cas où, je précise que les 3 potentiomètres sur la droite correspondent couleur par couleur aux 3 servos visualisés en 3D.
De même, les 3 potentiomètres autour de la boule correspondent à la position de la nacelle en X,Y et Z, le Z étant le potentiomètre de droite.
Pour simplifier les calculs, tous les auteurs (je n'ai pas inventé l'algo, juste implémenté en VB...) se ramènent à des droites parallèles aux axes réels du robot. Evidemment, un robot réel ne peut être construit sur ces axes (en particulier parce qu'ils se rejoignent au centre de la nacelle et que c'est mécaniquement impossible) Il y a une case à cocher pour visualiser ces axes réels, mais c'est encore incomplet.
Codes Sources
- ..
- 3D_Engine.PDM
- 3D_Engine.vbp
- 3D_Engine.vbw
- Button_down.gif
- Button_up.gif
- Button_up.psd
- cCube2 small.ico
- cCube2.ico
- file1.3df
- file2.3df
- file3.3df
- file4.3df
- file5.3df
- file6.3df
- Form1.frm
- Form1.frx
- Form2.frm
- FOXUSER.DBF
- FOXUSER.FPT
- framedbox.3df
- frm_cCone.frm
- frm_cCube.frm
- frm_cCylinder.frm
- frm_cLine.frm
- frm_cSphere.frm
- frm_cTorus.frm
- frm_Options.frm
- frm_Rotate.frm
- frm_Torus.frm
- Helios.3df
- Hidden.frm
- Hidden.frx
- inscribedcubeoncircle.3df
- mdlClavdelt.bas
- mdlJPL.bas
- mdlMIT.bas
- MSSCCPRJ.SCC
- m_engine_3d.bas
- m_variables.bas
- Readme.txt
- Sphere'n torii.3df
A voir également
- Pilotage robot delta
- Robot vocal ✓ - Forum C / C++ / C++.NET
- Robot traceur ✓ - Forum C / C++ / C++.NET
- Synthétiseur vocal en actionscript3 - Forum Flash
- Robot d'indexation - Forum C# / .NET
- Asp robot - Forum ASP.NET
Vous n'êtes pas encore membre ?
inscrivez-vous, c'est gratuit et ça prend moins d'une minute !
Les membres obtiennent plus de réponses que les utilisateurs anonymes.
Le fait d'être membre vous permet d'avoir un suivi détaillé de vos demandes et codes sources.
Le fait d'être membre vous permet d'avoir des options supplémentaires.