


Calcul des 3 rotations d'un repère 3d sur machine à mesurer
Description
BONJOUR.
BUT DU PROGRAMME :
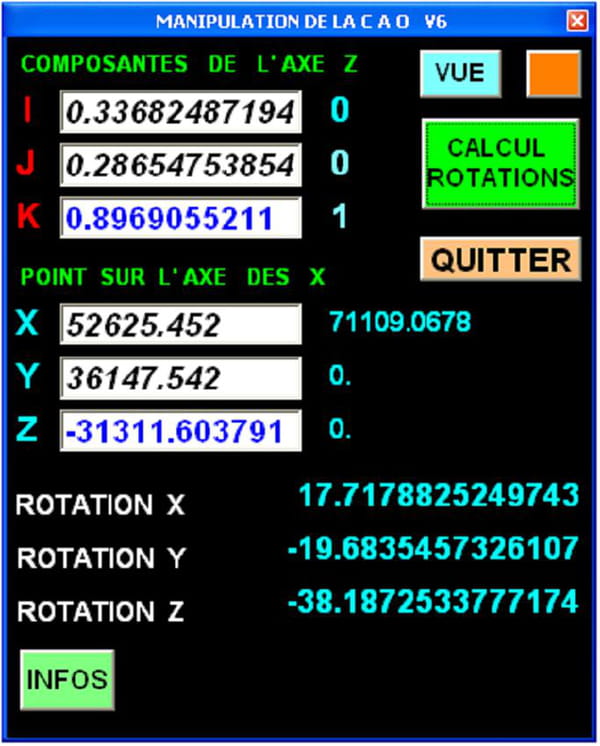
On a au départ un repère X, Y, Z quelconque dont l'origine est néanmoins à zéro et dont on connait
les composantes unitaires non nulles i et j de l'axe des Z ainsi que les coordonnées x et y
non nulles d'un point P qui sera sur l'axe des X du repère final.
On veut au final, par 3 rotations, avoir les composantes unitaires de l'axe Z de ce repère
comme suit : i = 0 j = 0 k = 1
On veut aussi que l'axe X de ce repère ait pour composantes unitaires : i = 1 j = 0 k = 0
Pour arriver à ce résultat : le programme va calculer les rotations autour de X puis de Y puis de Z
du repère quelconque.
La commande " VUE " permet de rendre toujours visible la feuille de saisie et à sa droite la touche
orange supprime cette particularité.
Saisie des données issues du repère quelconque:
- Pour l'axe des Z : saisir les composantes unitaires i et j puis seulement le signe du k.
- Puis pour un point qui sera situé sur l'axe des X du repère final, saisir ses coordonnées
non nulles x et y.
- Enfin on lance par la commande " CALCUL ROTATIONS " et on obtient les 3 rotations
voulues.
Si les données saisies ne vont pas permettre une bonne précision de calcul, le programme
proposera en option, une manipulation de la CAO avant une nouvelle saisie des données.
Et merci pour tout commentaire.
A bientôt
JPF
Ce programme permet de manipuler une CAO quand on utilise une machine à mesurer tridimensionnelle.
BUT DU PROGRAMME :
On a au départ un repère X, Y, Z quelconque dont l'origine est néanmoins à zéro et dont on connait
les composantes unitaires non nulles i et j de l'axe des Z ainsi que les coordonnées x et y
non nulles d'un point P qui sera sur l'axe des X du repère final.
On veut au final, par 3 rotations, avoir les composantes unitaires de l'axe Z de ce repère
comme suit : i = 0 j = 0 k = 1
On veut aussi que l'axe X de ce repère ait pour composantes unitaires : i = 1 j = 0 k = 0
Pour arriver à ce résultat : le programme va calculer les rotations autour de X puis de Y puis de Z
du repère quelconque.
La commande " VUE " permet de rendre toujours visible la feuille de saisie et à sa droite la touche
orange supprime cette particularité.
Saisie des données issues du repère quelconque:
- Pour l'axe des Z : saisir les composantes unitaires i et j puis seulement le signe du k.
- Puis pour un point qui sera situé sur l'axe des X du repère final, saisir ses coordonnées
non nulles x et y.
- Enfin on lance par la commande " CALCUL ROTATIONS " et on obtient les 3 rotations
voulues.
Si les données saisies ne vont pas permettre une bonne précision de calcul, le programme
proposera en option, une manipulation de la CAO avant une nouvelle saisie des données.
Et merci pour tout commentaire.
A bientôt
JPF
Source / Exemple :
C'est dans le ZIP.
Conclusion :
Ce programme permet de manipuler une CAO quand on utilise une machine à mesurer tridimensionnelle.
Codes Sources
A voir également
- Calcul des 3 rotations d'un repère 3d sur machine à mesurer
- Changement de repère 3d ✓ - Forum Visual Basic
- Passer d'un repère 3D à l'écran ✓ - Forum C++ & C++ .NET
- Rotation quelle est la formule pour une rotation? ✓ - Forum Delphi / Pascal
- Repère orthogonal - Forum VB.NET
- Calcul vitesse course a pied - Forum Visual Basic 6
Du même auteur (lexsty)
-
Evaluer un nombre d'objets avec une balance et deux échantillons - calcul incertitudes
-
Calcul de placement ou de pret - mensualites - montant - duree - taux annuel
-
Rechercher le nombre de dents d'un train de 4 ou 6 engrenages - rapport - pas de filetages - pignons sur lyre de tour
-
Simulateur de tirages du loto sans le rnd de visual basic mais avec wrnd . comparaison des résultats avec le calcul des prob
Vous n'êtes pas encore membre ?
inscrivez-vous, c'est gratuit et ça prend moins d'une minute !
Les membres obtiennent plus de réponses que les utilisateurs anonymes.
Le fait d'être membre vous permet d'avoir un suivi détaillé de vos demandes et codes sources.
Le fait d'être membre vous permet d'avoir des options supplémentaires.