


Mise en orbite d'un satellite
Description
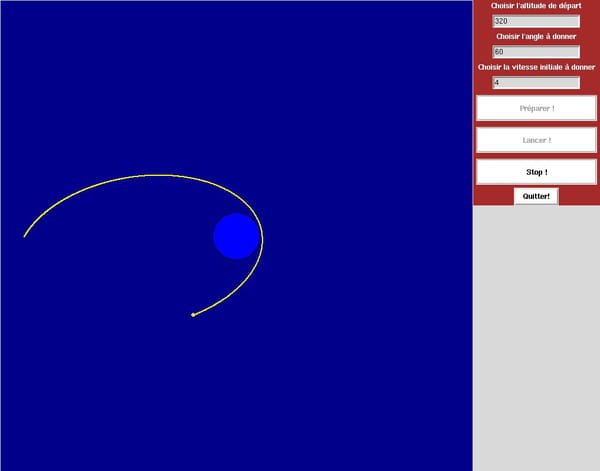
Ce code, largement inspiré de celui de HCD sur les collisions, simule la mise en orbite d'un satellite (frottements négligés). On peut donner en paramètres l'angle, la vitesse de départ ainsi que l'altitude du satellite.
Merci à HCD pour son code collisions.py
Source / Exemple :
#! /usr/bin/env python
# -*- coding: Latin-1 -*-
from Tkinter import *
from math import hypot,sqrt,floor,cos,sin,pi,atan,exp,log
from tkMessageBox import askokcancel
# Ce code simule la mise en orbite d'un satellite.
# Paramètres
#
# L'altitude doit être comprise entre 0 et 360
# La vitesse donnée doit être de l'odre de 15 (unité arbitraire)
# L'angle (exprimé en degrés) peut prendre toutes les valeurs entre 0 et 360
# On peut obtenir les différentes trajectoires d'un satellite (ellipse, parabole ou hyperbole)
# exemple : 105/105/14 ellipse
# 210/45/9 ellipse
# 350/18/12 hyperbole
# Quand à la parabole, c'est plus difficile à obtenir, je vous laisse essayer!
# Fonctionnement
#
# La constante K joue le rôle du produit G(constante de gravité universelle) * M (masse terrestre)
# La trajectoire du satellite est déterminée de façon numérique par résolution de l'équation mécanique:
# masse_satellite * accélération = force_gravitationnelle_exercée_par_la_terre_sur_le_satellite
def preparer():
# initialise les paramètres et dessine la terre
global flag,x,y,dx,dy,D,satellite
P.config(state=DISABLED)
T.config(state=ACTIVE)
can.delete(ALL)
altitude=int(E_altitude.get())
angle_degre=int(E_angle.get())
angle=angle_degre*2*pi/360
force=int(E_force.get())
x,y=L/2-D/2-altitude,L/2
dx,dy=force*cos(angle)/20,-force*sin(angle)/20
Terre=can.create_oval(L/2-D/2,L/2+D/2,L/2+D/2,L/2-D/2,fill='blue')
satellite=can.create_oval(x-d/2,y+d/2,x+d/2,y-d/2,fill='grey')
def lancer():
#lance le satellite
global flag
flag=1
orbite()
def orbite():
#fonction auxilliaire de la fonction lancer
global x,y,dx,dy,orb
if flag==1:
T.config(state=DISABLED)
#nouvelle position
x,y=x+dx,y+dy
r=hypot(x-L/2,L/2-y)
v=hypot(dx,dy)
#angle repérant la position du satellite par rapport à l'horizontale
if x-L/2>0:
theta=atan((-y+L/2)/(x-L/2))
else:
theta=atan((-y+L/2)/(x-L/2))+pi
dx,dy=dx-K*cos(theta)/(r*r),dy+K*sin(theta)/(r*r)
can.coords(satellite,x-d/2,y+d/2,x+d/2,y-d/2)
if x<0 or x>L or y<0 or y>L or r<D/2:
stop()
#suivi de la trajectoire du satellite
can.create_oval(x,y+1,x+1,y,outline='yellow')
orb=fen.after(8,orbite)
def stop():
#arrête le satellite et efface l'écran
""
global flag,orb
flag=0
fen.after_cancel(orb)
P.config(state=ACTIVE)
can.delete(ALL) # effacement du contenu de la fenêtre
E_angle.delete(0,angle)
E_force.delete(0,force)
texte=can.create_text(L/2,L/3,text='MERCI\n\nvous pouvez continuer en modifiant les paramètres\n\nou, tout simplement, arrêter !!!',fill="white")
def quitter():
#quitte le programme
ans=askokcancel('',"Voulez-vous réellement quitter ?")
if ans:fen.quit()
fen=Tk()
fen.title('Mise en orbite!')
L=800 #côté du canvas
D=80 #diamètre de la terre
d=8 #diamètre du satellite
flag=0
angle,force=0,0
K=50 #joue le rôle du produit G*M
can=Canvas(fen,bg='dark blue',height=L,width=L)
can.grid(row=1,column=0,rowspan=2)
can2=Canvas(fen,bg='brown',highlightbackground='brown')
can2.grid(row=1,column=1,sticky=N)
Button(can2,text='Quitter!',command=quitter,bg="white").pack(side=BOTTOM)
S=Button(can2,text='Stop !',height=2,width=25,relief=GROOVE,bg="white",activebackground="dark green",activeforeground="white",command=stop)
S.pack(padx=5,pady=5,side=BOTTOM,anchor=SW)
T=Button(can2,text='Lancer !',height=2,width=25,relief=GROOVE,bg="white",activebackground="dark green",activeforeground="white",command=lancer)
T.pack(padx=5,pady=5,side=BOTTOM,anchor=SW)
P=Button(can2,text='Préparer !',height=2,width=25,relief=GROOVE,bg="white",activebackground="dark green",activeforeground="white",command=preparer)
P.pack(padx=5,pady=5,side=BOTTOM,anchor=SW)
E_force=Entry(can2)
E_force.pack(padx=8,pady=5,side=BOTTOM)
Label(can2,text="Choisir la vitesse initiale à donner",fg='white',bg='brown').pack(side=BOTTOM)
E_angle=Entry(can2)
E_angle.pack(padx=8,pady=5,side=BOTTOM)
Label(can2,text="Choisir l'angle à donner",fg='white',bg='brown').pack(side=BOTTOM)
E_altitude=Entry(can2)
E_altitude.pack(padx=8,pady=5,side=BOTTOM)
Label(can2,text="Choisir l'altitude de départ",fg='white',bg='brown').pack(side=BOTTOM)
fen.mainloop()
fen.destroy()
Conclusion :
Merci à HCD pour son code collisions.py
Codes Sources
A voir également
- Mise en orbite d'un satellite
- Mise à jour sybase - Conseils pratiques -SQL
- Visual studio code mise en forme automatique ✓ - Forum ASP / ASP.NET
- Vba mise en forme cellule - Forum VB.NET
- Mise en forme largeur de colonne datagrid automatique - Forum Visual Basic
- L'opération doit utiliser une requête qui peut être mise à jour - Forum VB.NET
Vous n'êtes pas encore membre ?
inscrivez-vous, c'est gratuit et ça prend moins d'une minute !
Les membres obtiennent plus de réponses que les utilisateurs anonymes.
Le fait d'être membre vous permet d'avoir un suivi détaillé de vos demandes et codes sources.
Le fait d'être membre vous permet d'avoir des options supplémentaires.