


Pilotage d'un robot via le port série utilisant un moteur 2d programmé sous directx.
Description
J'ai réalisé ce projet avec Xary68.
Il s'agit d'un programme faisant appel à un moteur 2D utilisant DirectDraw et DirectInput (que j'ai déjà déposé entant que source).
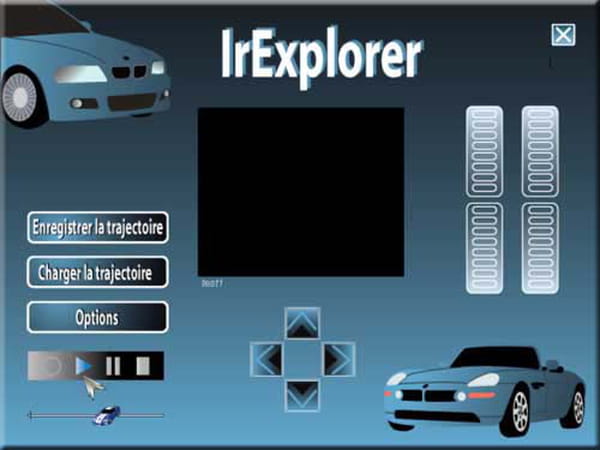
Il permet de communiquer avec un robot via le port série. Ce robot (une sorte de voiture) pourra ainsi se déplacer en fonction des ordres envoyés par l'utilisateur.
Nous avons mis en place un système utilisant une liste chaînée permettant d'enregistrer et de relire des trajectoires effectuées par le robot.
Le robot était équipé d'une caméra, mais nous ne sommes pas parvenu à afficher la vidéo dans la fenêtre de notre programme. Un problème de conflit entre notre moteur 2D et l'affichage d'un flux vidéo (c'est le seul problème non résolu que nous ayons rencontré).
Il y a plusieurs menus différents qui utilisent le moteur 2D, plusieurs threads qui sont dédiés à la communication avec le port série et l'affichage vidéo (qui n'est pas entièrement présente).
Le programme est destiné à Windows XP et 2000.
Si vous souhaitez avoir le rapport de conception détaillée de notre projet, ou plus d'informations, une page de mon site est dédiée à ce projet.
http://www.herveproduction.com
!!!!! ATTENTION !!!!!
Les images utilisées par le programme ne sont pas dans le zip, c'est trop gros et le site le refuse. Si vous souhaitez pouvoir le faire fonctionner, téléchargez le ici :
http://www.herveproduction.com/site/rapports/IrExplorer.zip
Il s'agit d'un programme faisant appel à un moteur 2D utilisant DirectDraw et DirectInput (que j'ai déjà déposé entant que source).
Il permet de communiquer avec un robot via le port série. Ce robot (une sorte de voiture) pourra ainsi se déplacer en fonction des ordres envoyés par l'utilisateur.
Nous avons mis en place un système utilisant une liste chaînée permettant d'enregistrer et de relire des trajectoires effectuées par le robot.
Le robot était équipé d'une caméra, mais nous ne sommes pas parvenu à afficher la vidéo dans la fenêtre de notre programme. Un problème de conflit entre notre moteur 2D et l'affichage d'un flux vidéo (c'est le seul problème non résolu que nous ayons rencontré).
Il y a plusieurs menus différents qui utilisent le moteur 2D, plusieurs threads qui sont dédiés à la communication avec le port série et l'affichage vidéo (qui n'est pas entièrement présente).
Le programme est destiné à Windows XP et 2000.
Conclusion :
Si vous souhaitez avoir le rapport de conception détaillée de notre projet, ou plus d'informations, une page de mon site est dédiée à ce projet.
http://www.herveproduction.com
!!!!! ATTENTION !!!!!
Les images utilisées par le programme ne sont pas dans le zip, c'est trop gros et le site le refuse. Si vous souhaitez pouvoir le faire fonctionner, téléchargez le ici :
http://www.herveproduction.com/site/rapports/IrExplorer.zip
Codes Sources
- ..
- Aides
- Images
- Bouton.h
- DDraw.h
- DInput.h
- EnvoisInfosCOM.h
- EnvoisTrames.h
- FenetreChargement.h
- FenetreDebut.h
- FenetreEnregistrement.h
- FenetreOptions.h
- InfoDialogue.h
- ListeChainee.h
- ListeChaineeTrajectoire.h
- main.cpp
- Menu.h
- Projet Robot.aps
- Projet Robot.sln
- Projet Robot.suo
- Projet Robot.vcproj
- resource.h
- Sprite.h
- StdAfx.h
- Trajectoire.h
- Trame.h
- TriChar.h
A voir également
- Pilotage d'un robot via le port série utilisant un moteur 2d programmé sous directx.
- Port mysql ✓ - Forum PHP
- String port - Forum Visual Basic 6
- Un programme tente d'envoyer un courrier en votre nom ✓ - Forum Visual Basic 6
- Créer un moteur de recherche interne ✓ - Forum PHP
- Créer un utilisateur mysql - Conseils pratiques -PHP
Vous n'êtes pas encore membre ?
inscrivez-vous, c'est gratuit et ça prend moins d'une minute !
Les membres obtiennent plus de réponses que les utilisateurs anonymes.
Le fait d'être membre vous permet d'avoir un suivi détaillé de vos demandes et codes sources.
Le fait d'être membre vous permet d'avoir des options supplémentaires.